Рольганги
 Одним из самых распространенных механизмов на металлургических заводах является рольганг. Предназначен он для поштучной транспортировки заготовок к карманам выгрузки или к технологическому оборудованию. Одним из самых распространенных механизмов на металлургических заводах является рольганг. Предназначен он для поштучной транспортировки заготовок к карманам выгрузки или к технологическому оборудованию.
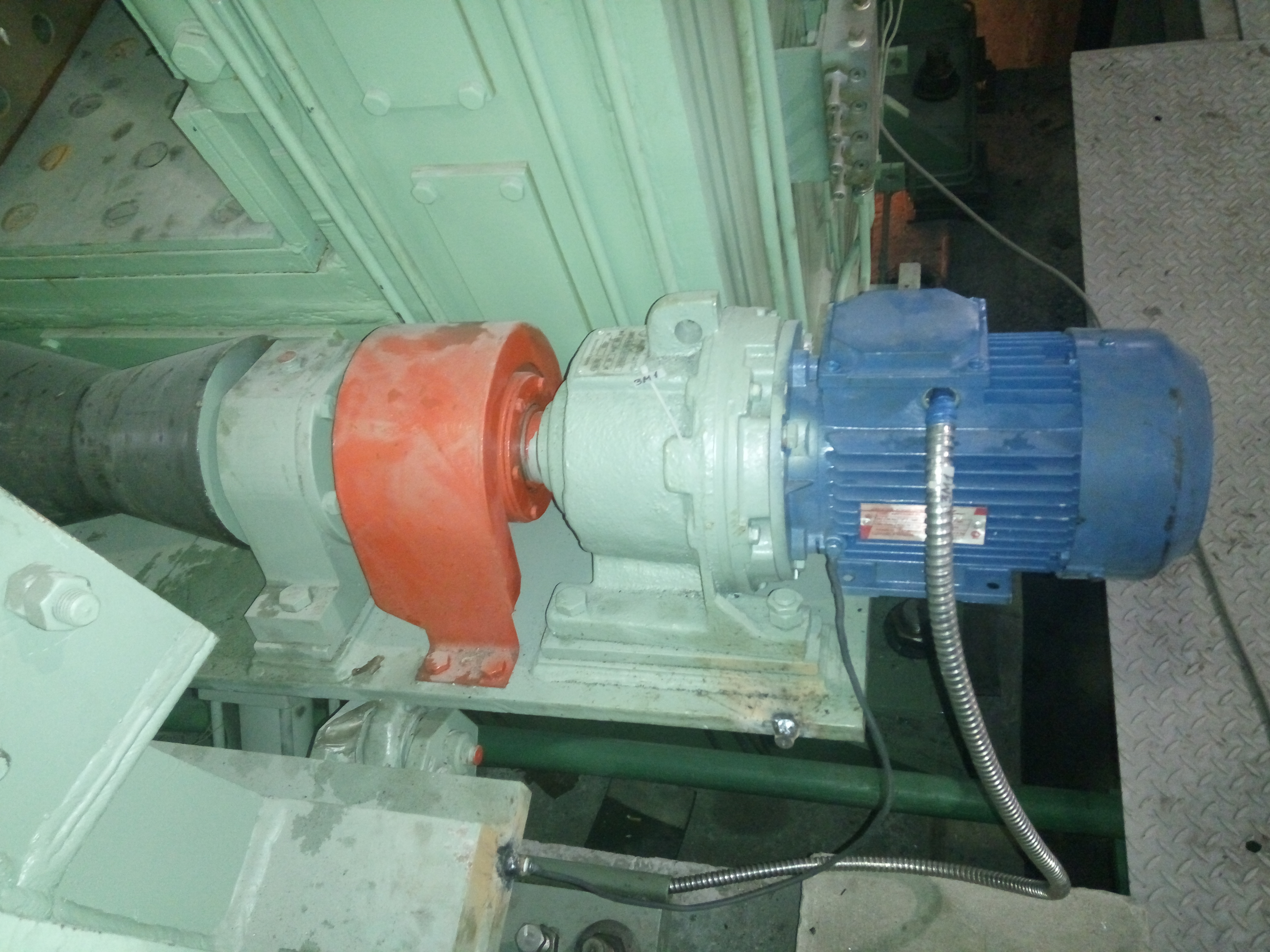
Например, участок правки труб невозможно представить себе без задающего рольганга, подающего поштучно тубы к правильной машине. Причем состоит он из двух секций роликов. Одна секция стационарная, а другая – подъемная. Стационарный рольганг состоит из опорной металлоконструкции, на которой установлен С-образный желоб с роликами. У каждого ролика имеется индивидуальный привод, состоящий из электродвигателя и редуктора. Достаточно часто для привода ролика используется мотор-редуктор.
Подъемная секция состоит из аналогичной металлоконструкции и желоба с роликами. Но помимо этого все ролики связаны рычажной системой со штоком гидроцилиндра, срабатывание которого и приводит к опусканию всей секции роликов. А с валами редукторов ролики связаны карданными валами. Опускать секцию роликов необходимо в момент начала правки труб, чтобы избежать повреждения роликов свободным концом трубы.
Для регулировки скорости вращения роликов используют частотное регулирование. Необходимо менять скорость подачи труб в зависимости от их сортамента. Кроме того, схемой управления в данном случае должен быть предусмотрен аварийный реверс и динамическое торможение.
Из перечисленного оборудования хорошо видно, что одним из основных элементов всей конструкции является редуктор. Если будут приобретены редукторы низкого качества с заеданиями и биениями в процессе работы, то это приведет к повышению пускового тока и срабатыванию защиты. А любой простой на подобных участках чреват большими убытками. Поэтому приобретать редукторы необходимо лишь у проверенных производителей, к которым можно отнести НТЦ Редуктор Украина.
Но для заказа редуктора необходимо правильно рассчитать его параметры. Для этого выполняется достаточно простой расчет, позволяющий определить необходимо передаточное число редуктора.
Для этого вначале определяется момент холостого хода ролика. Затем с его помощью определяется момент транспортировки трубы максимального диаметра и момент буксования трубы. Аналогично определяются моменты транспортировки и пробуксовки трубы минимального диаметра. После этого можно определить необходимую мощность электродвигателя для транспортировки максимальной и минимальной трубы на заданных скоростях. Теперь остается лишь определить частоту вращения роликов на заданных скоростях транспортировки.
В результате получится диапазон частот. На заключительном этапе остается лишь подобрать электродвигатель и передаточное число редуктора, которое бы обеспечивало бы необходимые моменты на валу и необходимые обороты ролика при номинальных данных двигателя. | 








